
Naujieji kojų protezai veiks pagal neuroraumeninės kontrolės sistemą
Žmonėms, turintiems amputuotos kojos protezą, nesvetimi yra kliuvimai ir griuvimai, kurie gali būti lydimi įvairių susižalojimų. Tačiau tikimasi, jog naujieji robotiniai protezai, kuriami Carnegie Mellon universitete, pajėgs užtikrinti gebėjimą išlaikyti kūno pusiausvyrą ir taip apsaugoti nuo skaudžių pasekmių.
Pažangioji protezo valdymo sistema buvo sukurta išanalizavus žmogaus refleksus ir kitas neuroraumeninės kontrolės sistemas. Pakoregavus protezo funkcionavimą atsižvelgiant į žmogaus neurofiziologiją, pastebėta, jog vaikščiojimas tapo stabilesnis, net einant nelygiu paviršiumi, taip pat tapo paprasčiau atsistoti suklupus ar pargriuvus.
Per ateinančius trejus metus šią technologiją toliau planuojama tobulinti ir testuoti su savanoriais, kuriems koja amputuota aukščiau kelio sąnario. Tyrėjų komandoje dirba mechaninės inžinerijos ir robotikos profesorius Steve Collins, robotikos profesoriaus asistentas Hartmut Geyer, Protezinės ortopedijos ir reabilitacijos mokslo ir technologijų skyriaus Pitsburgo universitete vadovas Santiago Munoz.
“Protezas gali kompensuoti po amputacijos prarastos kojos raumenų funkciją, tačiau jei žmogų nuolatos persekios baimė nukristi, jis juo nesinaudos. Todėl siekiama, kad šiuolaikiniai protezai atliktų judesius kuo panašesnius į tikros kojos. Žinodami kaip žmogaus nervinė sistema reguliuoja galūnių judesius, galime pritaikyti šiuos principus robotinių galūnių kūrimui,” – teigė Hartmut Geyer.
Tie patys principai gali būti pritaikyti ne tik protezų, bet ir pačių robotų kūrimui. Ši Hartmut Geyer neuroraumeninės kontrolės schemos taikymo kojų protezams ir robotams idėja neseniai buvo pristatyta Hamburgo Tarptautinėje išmaniųjų robotų ir sistemų konferencijoje.
Pastarąjį dešimtmetį Geyer, studijuodamas motorinės sistemos kontrolę, suprato, jog kojos tiesiamųjų raumenų grupė yra svarbiausia sąnarių ištiesimui. Einant, kai koja “pajaučia” tvirtą atramą į šiuos raumenis iš smegenų ateina impulsai, kurie lemia tiesiamųjų raumenų susitraukimą, kuris stebimas kaip kojos išsitiesimas.
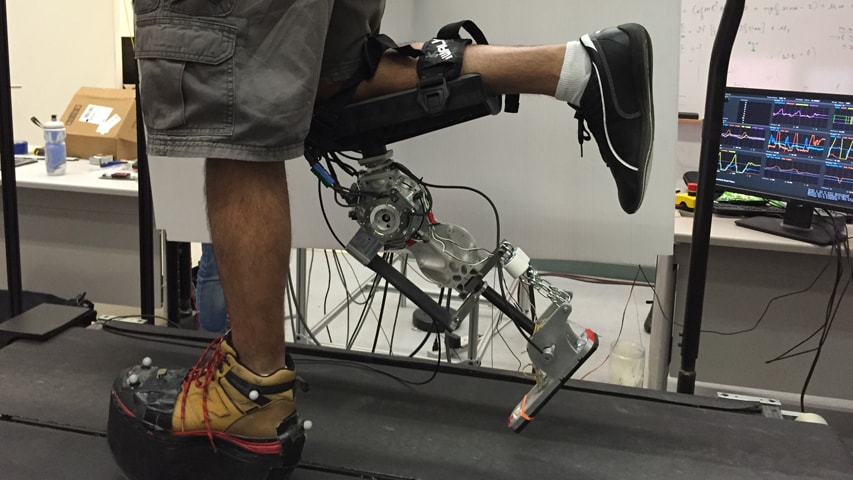
Geyerio komanda pritaikė neuroraumeninį modelį impulsus sugeneruodami kompiuteriu ir juos perduodami į įrenginį, pavadintą “Robotine neuroraumenine koja 2” (angl. Robotic Neuromuscular Leg2), kuri yra perpus mažesnė už tikrą koją.
Tyrėjai atrodo, jog neuroraumeninės kontrolės metodu galima atkurti normalų, įprastą ėjimo modelį. Tačiau prieš akis dar laukia daug darbo, nes kol kas ši robotinė koja dar nėra pasiruošusi judėti nestabiliu, siūbuojančiu paviršiumi.
Naujasis protezas turės nedidelį variklį, kurio dėka “koja” galės susilenkti per kelio ir čiurnos sąnarius reikiamu kampu tam, kad atkurti kuo natūralesnę eiseną. Be to, šis variklis kompensuos prarastų raumenų jėgą, kuri užtikrins galimybę judėti greitai.
Amerikoje daugiau nei milijonui žmonių yra atlikta kojos amputacija ir manoma, jog šis skaičius 2050 metais bus keturis kartus didesnis. Pusė šių, negalią turinčių, žmonių pripažįsta, jog vaikščiodami su protezu jaučia baimę nukristi. Taip pat didelė dalis teigia, jog sunkumai, su kuriais susiduria vaikščiodami nelygiu paviršiumi, blogina jų gyvenimo kokybę.
“Naujo dizaino ir kontroliavimo sistemos robotiniai protezai yra vizija, kuri užtikrintų galimybę sumažinti šias negalios sukeliamas problemas” – teigia Hartmut Geyer.
Parengta pagal sciencedaily.com
Facebook komentarai
Robotų parduotuvė
Žaislų parduotuvė

Naujausi įrašai

Europos Sąjunga ir robotika: kur link mes keliaujame?

Parrot SLAM dunk – paketas, skirtas bepiločių gamintojams (Video)

Mesh Mould – robotas-statybininkas (Video)

Inovacinis robotas-dažytojas PictoBot iš Singapūro (Video)

Plobot – robotas, mokantis vaikus programavimo (Video)

HES Hywings — bepilotis, naudojantis vandenilio kurą (Video)

Emotix Miko — komunikacinis robotas su emocijomis (Video)

MMS Drone – patvarus benzininis bepilotis (Video)












Komentarai (0)