
Dvikojai robotai mokosi žmogiškosios eisenos
Gelbėtojai stichijų nusiaubtose zonose, namų ruošos padėjėjai ar „kolegos“ modernioje darbo aplinkoje: yra daugybė galimų sričių, kuriose ateityje įmanoma pritaikyti humanoidinius robotus. „Vienas iš didžiausių iššūkių, su kuriuo susiduriame, tai priversti robotą judėti ant dviejų kojų skirtingose situacijose, be jokių incidentų – atsižvelgiant į nežinomą vietovę bei galimus trikdžius,“ – paaiškino profesorė Mombaur, kuri vadovauja „Robotikos ir Biomechanikos Optimizavimo“ darbo grupei Heidelbergo Universitete, Tarpdisciplininiame Mokslinės Kompiuterijos Centre.
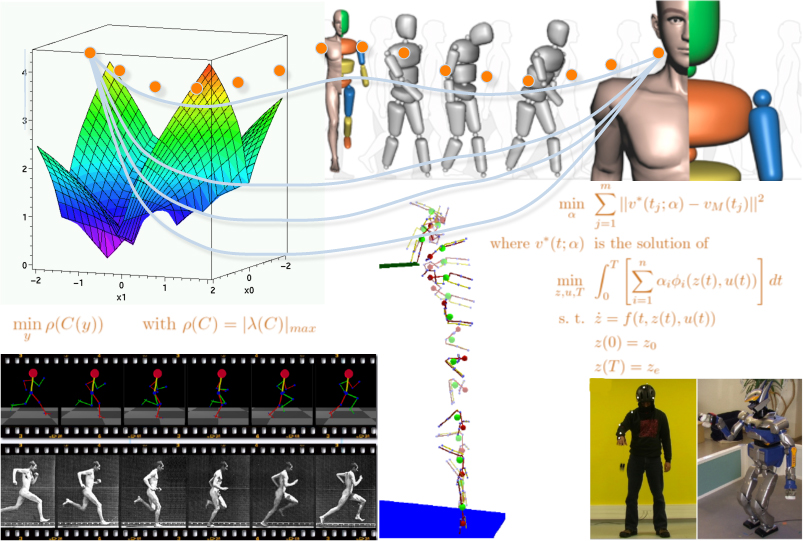
KoroBait projekto metu tyrėjai studijuos tai, kaip žmonės vaikščioja, pavyzdžiui, kaip lipa laiptais arba leidžiasi nuo nuokalnės, ant minkšto arba slidaus paviršiaus – šios žinios bus panaudotos kuriant matematinius modelius. Be to, kad kurtų naujas optimizavimo ir mokymosi procesus vaikščiojimui ant dviejų kojų, mokslininkai planuoja panaudoti šias žinias jau egzistuojančiuose robotuose. Tyrėjų atradimai be abejo paveiks ir dizaino principus ateities robotuose.
Be profesorės Mombour grupės projekte taip pat dalyvauja ir „Simuliacijos ir Optimizacijos“ darbuotojų komanda. Heidelbergo mokslininkai ištirs, kaip paversti žmogaus judėseną į matematinius modelius. Po to, tyrėjai sieks sukurti optimizuotus eisenos judesius skirtingiems poreikiams ir kurti naujus modeliais pagrįstus kontrolės algoritmus.
Tarptautinio konsorciumo partneriai, be jau minėto Heidenbergo Universiteto, yra Karlsruhe‘o Technologijos Institutas, Nacionalinis Mokslinių Tyrimų Centras (Prancūzija), Italijos Technologijos Institutas, Delfo Technologijos Universitetas Olandijoje. Ekpertai iš Tübingeno Universiteto bei Izraelio Wiezmanno Mokslo Instituto taip pat prisidės prie projekto, savo kognityvinių mokslų žiniomis.
Nors projektas ir orientuotas į robotiką, tačiau mokslininkai tikisi, kad panašią technologiją bus galima pritaikyti ir medicinoje, pavyzdžiui, kuriant modernias dirbtines galūnes. Kitos technologijos pritaikymo galimybės įžvelgiamos egzoskeletų kūrime bei kompiuterinėje video žaidimų animacijoje.
Originalus straipsnis:
http://phys.org/news/2013-10-two-legged-robots-human.html
Facebook komentarai
Robotų parduotuvė
Žaislų parduotuvė

Naujausi įrašai

Europos Sąjunga ir robotika: kur link mes keliaujame?

Parrot SLAM dunk – paketas, skirtas bepiločių gamintojams (Video)

Mesh Mould – robotas-statybininkas (Video)

Inovacinis robotas-dažytojas PictoBot iš Singapūro (Video)

Plobot – robotas, mokantis vaikus programavimo (Video)

HES Hywings — bepilotis, naudojantis vandenilio kurą (Video)

Emotix Miko — komunikacinis robotas su emocijomis (Video)

MMS Drone – patvarus benzininis bepilotis (Video)












Komentarai (0)